Next stage of the build is to work out how to hold the pen. Some people call this the gantry or holder, I’ll be calling mine the gondola.
I decided to use lollipop sticks for this, they have a similar length to whiteboard maker pens, reasonably light weight and at only 50p for a pack of 50 sticks and it was an obvious choice!
Clamping the Sticks for drilling
Having cut a few sticks down to size I then clamped them together to drill a thread hole through them using my trusty dremel.
Lining them up for gluing.
First one clamped down.
With the first side clamped in place and the wood glue drying things are starting to take shape.
Sides nearly finished.
And the finished gondola! look forward to a video of the first test draw in a couple of days . . . things are a bit shaky!
With the research all done, I started thinking about how I wanted to build my PlotBot. Having looked at the other designs, I found they were either mounted on a wooden frame and then a piece of paper is taped onto the wooden panel, or they draw directly onto a surface like glass or a wall. Given that the aim is just to make something that catches peoples eye, rather than making posters or drawings for people, I think the best course of action would be to use a whiteboard. I can get one reasonably cheaply, and the mounting is pretty much already sorted.
The whiteboard and mountings.
Once I had bought a whiteboard (600mm x 450mm) I started lining up the parts I had as to how I would mount them. I had also bought 2 Pololu 1204 Stepper Motors and an Adafruit Motorshield v2 (AFMSv2). I did have a few concerns with these parts combined together, in that the motors only draw 600mA and the motorshield provides 1.2A per channel, therefore the motors might get a little hot if they start drawing more than they should – but we’ll see how it goes!
Roughly lining up the parts on a sheet of acrylic.
To mount the acrylic sheet to the whiteboard I used two of the mounts supplied with the whiteboard secured on the top of the sheet. These then hook onto the edge of the whiteboard, and the mounts on the side are adjustable to “lock in” the sheet to the sides of the board. Finally I decided to neatly mount the arduino and AFMSv2 in the center of the acrylic sheet.
I picked up two remote control car wheels at a local hobby store, along with 50m of fishing line, which would form the basis for my reels.
I found some nuts in the garage that fitted the inside of the wheel, and used Araldite (metal glue) to fill the gap around the stepper motor shaft hoping that this wouldn’t go wrong.
Araldite’s in, I was a little bit messy dripping it everywhere!
With the luck of the gods, after leaving it 24 hours to cure I was able to punch the stepper motor shaft out of the nut, leaving a nice shaped hole. The advantage of this method being that I can very easily remove the reels and use the steppers in other projects.
Now that I have the reels mounted on the steppers, I was able to complete the main build; mounting the steppers onto the acrylic sheet, and winding the fishing line onto the wheels – happy days!
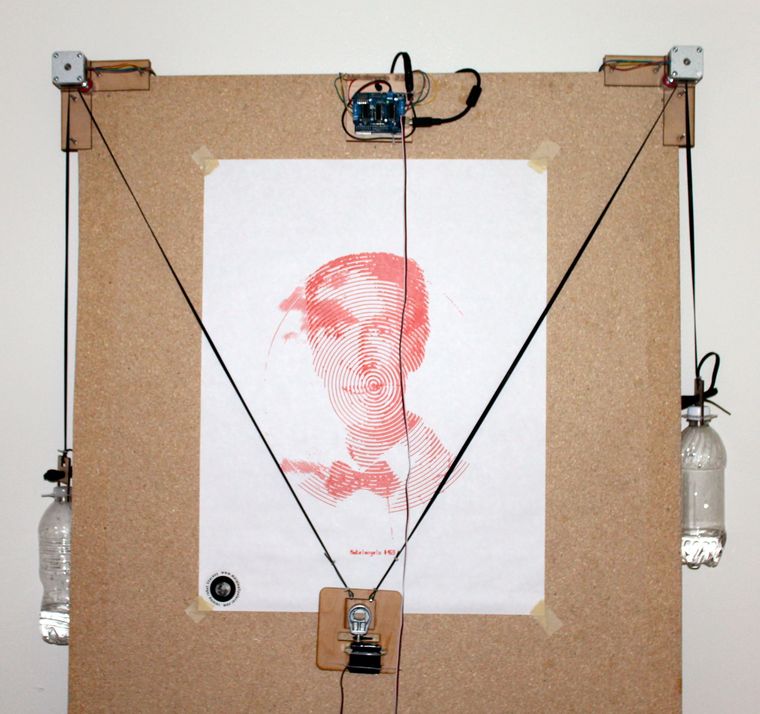
So as time draws on we are getting closer to the start of the new academic year, and of course that means Fresher’s Fair! At Kent we have several creative societies including SpaceSoc and their “Build a Rocket” sessions, Engineering Soc with their focus on robotics, and TinkerSoc who want to help people build without limits. With TinkerSoc it has become somewhat of a tradition to build and showoff a project at the fresher’s fair. In previous years we have had a laser engraver making custom name tags and furbies singing bohemian rhapsody, basically something to grab peoples attention and imagination. Having seen a number of vertical plotters online I have decided now is the time to build one.
The standard vertical plotter is made up of 2 stepper motors, a servo, a motor controller and a microcontroller. By providing a stream of polar coordinates to the robot, the two motors can be wound in and out to move a pen across the whiteboard. This produces drawings where the pen never leaves the surface however that does not limit the styles of drawings that can be produced. Drawings can be developed further by adding a server or linear actuator to the pen carriage in order to push the pen off the drawing surface, thus allowing mush more freedom to implement different drawing styles.
Obviously we cannot draw above, or on either side of the motors, however the effectiveness of the plotter changes depending on the position of the pen carriage. As such the most effective drawing area is a rectangle in the centre of the drawing surface with the tension on a cord being too low on either side, and the resolution is too low at the top due to the large angles. (http://2e5.com/plotter/V/design/
There have been a great many vertical plotters in the past, a great list can be found at plotterbot.com. Overall there seem to be two different styles of drawing with vertical plotters.
Single line, where the pen never leaves the surface, is technically less challenging and can provide great results however you can be left with the odd scrawl across the surface that you didn’t want.
Multi line, where the pen can be lifted/pushed away from the surface, allows much more flexibility with regards to what can be drawn as the robot won’t scrawl connecting lines across the surface however does add the extra complexity of having a servo or linear actuator to push the pen carriage away from the surface.
Bearing in mind the saying, the more complex it is, the more likely it is to break.
Tinkerlog’s “Der Krizler” is definitely one of the more popular V-plotters out there, drawing on glass to amuse passers-by.
For some time I have wanted to have a go at book binding. It seems like a great thing to do as a gift for a loved one, but maybe that’s just me. Well I decided to make my girlfriend a photo album and sketch book as a Christmas present. Hence why this is being published after Christmas to avoid her surprise being ruined. On the next occasion that I decide to make a book I would choose paper with a lower gsm that I have done for these. I selected 300 gsm, which is great for the photo album, however for the book it is a little too thick to easily flick the pages.
Anyway, to the book binding process. After having folded 20 sheets of paper I clamped them together in-between two other books (sheets of wood are better) and then coated the folded edges with Copydex, a latex based contact adhesive, and a cut of cloth placed over it. By doing this the Copydex soaks into the cloth and the paper to make a reasonably strong joint.
Now that the pages have been bound, its time to make the cover. Using 5mm rigid foam and sticky back cloth, I cut out the front, back and the spine and laid the parts out on the cloth. When doing this make sure to leave a large border of cloth which is used in the next step to cover the edges.
Alas I forgot to take enough photos but the next step is to fold the edges of the cloth up and over to cover the edges of the board. this can be a little tricky because of the sticky-ness but it looks good if you persevere.
In order to securely join the pages and the cover, we have to use a joining page which gets glued on the front and back cover, and the front and back of the stack of pages. Finally we are starting to look a bit more professional and are ready to glue in the pages.
Make sure to use a nice big weight when gluing in the pages just to make sure everything is nice and flat!
Within the halls of the London College of Communication, makers were separated by categories into different studios. We had lots to look at and admire, however Raspberry Pi’s and 3D printers, not surprisingly took centre stage.
I don’t intend to talk about everything that happened, just a few things that really made an impression on me.
One 3D printer that caused me to take a second glance, and a third, and a fourth, and a chat with the creator, was the 3DR.
The 3DR is an inverted delta-bot style 3D printer that is constructed mainly out of 3D printed parts. Because of the simple design it seems to me that it must be must easier to set-up initially as the only areas you need to focus on are how tight the strings/cam belt are, and the position of the 3 arms, of course that is only the case if the rod guides are all the same height and parallel to each other.
A 3D printing company caught my eye as we wandered around because of their impressive printed objects and nicely build RepRap printers. Active 3D is based in Tunbridge Wells and aim to help introduce schools in the area to the opportunities that are available in 3D Printing. They offer workshops and monthly meetups which aim:
To train people in how to use 3D printers.
To train people how to maintain a 3D printer.
To provide an easy to use instruction manual.
And finally, catering to the more artistic of us, and the thirsty, the Tropism Well could be found in one of the main halls.
The Tropism Well is a drinking fountain with a difference. With a base made up of a 14 litre tank, which can be filled with any beverage, the Well automatically detects the presence of a person and elegantly bow’s its neck, presenting to the honoured person a gift of a perfectly poured serving or a drink, before bringing its neck back up straight as if to observe you enjoying its gift.
So the three of us are off to The Elephant & Castle Mini Maker Faire on Saturday. Maker Faire’s were created by Make Magazine in the USA, they are now events that happen all over the world.
Currently in the UK we have 6 Mini Maker Faire’s in; Brighton, London, Nottingham, Manchester, Dublin and Edinburgh. There is also a “featured” Maker Faire in Newcastle. Find your nearest Maker Faire here.
On the agenda for the Elephant & Castle Mini Maker Faire in London are loads of workshops including learning to solder (Through Hole and Surface mount), creating a mini synth and 3D modelling in Blender. See the full list here.
We are really looking forward to the day and will update everyone with what we see and do! =]